This page documents the functionality present in this library that deals with the
management and manipulation of images. One thing to note is that there is no
explicit image object. Instead, everything deals with
array2d objects that contain various kinds of pixels or user defined
generic image objects.
Pixel Types
Most image handling routines in dlib will accept images containing any pixel type.
This is made possible by defining a traits class, pixel_traits, for
each possible pixel type. This traits class enables image processing routines to determine
how to handle each kind of pixel and therefore only pixels which have a pixel_traits definition
may be used. The following list defines all the pixel types which come with pixel_traits definitions.
RGB
There are two RGB pixel types in dlib, rgb_pixel and bgr_pixel.
Each defines a 24bit RGB pixel type. The bgr_pixel is identical to rgb_pixel except that it lays
the color channels down in memory in BGR order rather than RGB order and is therefore useful
for interfacing with other image processing tools which expect this format (e.g. OpenCV).
RGB Alpha
The rgb_alpha_pixel is an 8bit per channel RGB pixel with an 8bit alpha channel.
HSI
The hsi_pixel is a 24bit pixel which represents a point in the Hue Saturation Intensity
(HSI) color space.
HSV
The hsv_pixel is a 24bit pixel which represents a point in the Hue Saturation Value
(HSV) color space.
LAB
The lab_pixel is a 24bit pixel which represents a point in the CIELab color space.
Grayscale
Any built in scalar type may be used as a grayscale pixel type. For example, unsigned char, int, double, etc.
Object Detection
If you want to create object detectors then try the
scan_fhog_pyramid tool first. It is quite
easy to use and train and will, in many cases, give excellent results. If that
doesn't give good results then try the more powerful
convolutional neural network based detector.
This routine takes a set of images and bounding boxes within those
images and doubles the size of the dataset by adding left/right
flipped copies of each image as well as the corresponding bounding
boxes. Therefore, this function is useful if you are training and
object detector and your objects have a left/right symmetry.
This routine takes a set of images and bounding boxes within those images and
grows the dataset by computing many different rotations of each image. It will
also adjust the positions of the bounding boxes so that they still fall on the
same objects in each rotated image.
This global function copies one image into another and performs any
necessary color space conversions to make it work right. Additionally,
if the dynamic range of the source image is too big to fit into the destination image
then it will attempt to perform the appropriate scaling.
assign_pixel() is a templated function that can assign any pixel type to another pixel type.
It will perform whatever conversion is necessary to make the assignment work. (E.g. color to
grayscale conversion)
assign_pixel_intensity() is a templated function that can change the
intensity of a pixel. So if the pixel in question is a grayscale pixel
then it simply assigns that pixel the given value. However, if the
pixel is not a grayscale pixel then it converts the pixel to the
HSI color space and sets the I channel to the given intensity
and then converts this HSI value back to the original pixel's
color space.
This is a simple struct that represents an BGR colored graphical pixel with an
alpha channel.
The difference between this object and the rgb_alpha_pixel
is just that this struct lays its pixels down in memory in BGR order rather
than RGB order. You only care about this if you are doing something like
using the cv_image object to map an OpenCV image
into a more object oriented form.
This is a simple struct that represents a BGR colored graphical pixel.
The difference between this object and the rgb_pixel
is just that this struct lays its pixels down in memory in BGR order rather
than RGB order. You only care about this if you are doing something like
using the cv_image object to map an OpenCV image
into a more object oriented form.
This object is a tool for performing image feature extraction. In
particular, it wraps another image feature extractor and converts the
wrapped image feature vectors into a high dimensional sparse vector. For
example, if the lower level feature extractor outputs the vector [3,4,5]
and this vector is hashed into the second bin of four bins then the output
sparse vector is:
[0,0,0,0, 3,4,5,1, 0,0,0,0, 0,0,0,0].
That is, the output vector has a dimensionality that is equal to the number
of hash bins times the dimensionality of the lower level vector plus one.
The value in the extra dimension concatenated onto the end of the vector is
always a constant value of 1 and serves as a bias value. This means
that, if there are N hash bins, these vectors are capable of representing N
different linear functions, each operating on the vectors that fall into
their corresponding hash bin.
The following feature extractors can be wrapped by the binned_vector_feature_image:
Computes and returns the dominant angle (i.e. the angle of the dominant gradient)
at a given point and scale in an image. This function is part of the
main processing of the SURF algorithm.
Computes the 64 dimensional SURF descriptor vector of a box centered
at a given center point, tilted at a given angle, and sized according to
a given scale.
This is a tool for tracking moving objects in a video stream. You give it
the bounding box of an object in the first frame and it attempts to track the
object in the box from frame to frame.
This tool is an implementation of the method described in the following paper:
Danelljan, Martin, et al. "Accurate scale estimation for robust visual
tracking." Proceedings of the British Machine Vision Conference BMVC. 2014.
This function is a tool for creating a detection template usable by
the scan_image_pyramid object. This
particular function creates a detection template with a grid of feature
extraction regions.
This function is a tool for creating a detection template usable by
the scan_image_pyramid object. This
particular function creates a detection template with four overlapping feature
extraction regions.
This function is a tool for creating a detection template usable by
the scan_image_pyramid object. This
particular function creates a detection template with exactly one feature
extraction region.
This function creates an image pyramid and packs the entire pyramid into
one big image. It does this by tiling the different pyramid layers together
and outputting the result. Here is an example:
Also, you can use the
image_to_tiled_pyramid()
and
tiled_pyramid_to_image() routines
to convert between the input image coordinate space and the tiled pyramid
coordinate space.
This object is meant to be used as a simple wrapper around the OpenCV
IplImage struct or Mat object. Using this class template you can turn
an OpenCV image into something that looks like a normal dlib style
image object.
So you should be able to use cv_image objects with many of the image
processing functions in dlib as well as the GUI tools for displaying
images on the screen.
Note that you can do the reverse conversion, from dlib to OpenCV,
using the toMat routine.
The scan_image_pyramid object represents a sliding
window classifier system. For it to work correctly it needs to be given a set of
object boxes which define the size and shape of each sliding window and these windows
need to be able to match the sizes and shapes of targets the user wishes to detect.
Therefore, the determine_object_boxes() routine is a tool for computing a set of object boxes
which can meet this requirement.
Applies a random color transform an image. This is done by
creating a random_color_transform with the given parameters and then
transforming each pixel in the image with the resulting transform.
This function takes a FHOG feature map which was created by
extract_fhog_features and
converts it into an image suitable for display on the screen. In
particular, we draw all the hog cells into a grayscale image in a
way that shows the magnitude and orientation of the gradient
energy in each cell.
Draws a filled in polygon onto an image. Also filling in part
of the convex hull of the polygon as well. Specifically,
fills in any row of pixels falling horizontally between two parts of
the polygon.
This routine looks at the 8 pixels immediately surrounding a pixel
and encodes their on/off pattern into the 8 bits of an unsigned char.
Needless to say, this routine only makes sense for binary images.
This function allows you to efficiently run a bunch of
scan_fhog_pyramid based
object_detectors
over an image. Importantly, this function is faster than running
each detector individually because it computes the HOG features
only once and then reuses them for each detector.
This function implements the HOG feature extraction method described in
the paper:
Object Detection with Discriminatively Trained Part Based Models by
P. Felzenszwalb, R. Girshick, D. McAllester, D. Ramanan
in IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 32, No. 9, Sep. 2010
This means that it takes an input image and outputs Felzenszwalb's
31 dimensional version of HOG features.
This function extracts the high-dimensional LBP feature described in the
paper:
Blessing of Dimensionality: High-dimensional Feature and Its Efficient
Compression for Face Verification by Dong Chen, Xudong Cao, Fang Wen, and
Jian Sun
This function allows you to extract an arbitrary quadrilateral patch from
an image. For example, given the image on the left and the 4 corners of the
red box you can extract the image on the right:
This function extracts "chips" from an image. That is, it takes a list of
rectangular sub-windows (i.e. chips) within an image and extracts those
sub-windows, storing each into its own image. It also allows the user to
specify the scale and rotation for the chip.
Extracts histograms of uniform local-binary-patterns from an image. The
histograms are from densely tiled windows that do not overlap and cover all
of the image.
We use the idea of uniform LBPs from the paper:
Face Description with Local Binary Patterns: Application to Face Recognition
by Ahonen, Hadid, and Pietikainen.
This routine finds bright "keypoints" in an image. In general,
these are bright/white localized blobs. It does this by computing
the determinant of the image Hessian at each location and storing
this value into an output saliency image if both eigenvalues of
the Hessian are negative. If either eigenvalue is positive then
the saliency for that pixel is 0.
This routine is similar to sobel_edge_detector(),
except instead of finding an edge it finds a bright/white line.
For example, the border between a black piece of paper and a white
table is an edge, but a curve drawn with a pencil on a piece of
paper makes a line.
This function takes an input image and generates a set of candidate
rectangles which are expected to bound any objects in the image. It does
this by running a version of the segment_image routine on the image and
then reports rectangles containing each of the segments as well as rectangles
containing unions of adjacent segments. The basic idea is described in the
paper:
Segmentation as Selective Search for Object Recognition by Koen E. A. van de Sande, et al.
Note that this function deviates from what is described in the paper slightly.
See the code for details.
This routine finds dark "keypoints" in an image. In general, these are dark
localized blobs. It does this by computing the determinant of the image
Hessian at each location and storing this value into an output saliency
image if both eigenvalues of the Hessian are positive. If either eigenvalue
is negative then the saliency for that pixel is 0.
This routine is similar to sobel_edge_detector(),
except instead of finding an edge it finds a dark line.
For example, the border between a black piece of paper and a white
table is an edge, but a curve drawn with a pencil on a piece of
paper makes a line.
This routine finds endpoints of lines in a thinned binary image.
For example, if the image was produced by skeleton()
or something like a Canny edge detector then you can use
find_line_endpoints() to find the pixels sitting on the ends of
lines.
This routine finds all points in an image with a pixel value above a
threshold. It also has the ability to produce an efficient random
subsample of such points if the number of them is very large.
This routine takes a set of images and bounding boxes within those images and
mirrors the entire dataset left to right. This means that all images are
flipped left to right and the bounding boxes are adjusted so that they still
sit on top of the same visual objects in the new flipped images.
This global function performs spatial filtering on an image with a user
supplied separable filter. It is optimized to work only on float valued
images with float valued filters.
This function returns an object_detector that is
configured to find human faces that are looking more or less towards the camera.
It is created using the scan_fhog_pyramid
object.
get_pixel_intensity() is a templated function that
returns the grayscale intensity of a pixel. If the pixel isn't a grayscale
pixel then it converts the pixel to grayscale and returns that value.
This function runs the complete SURF algorithm on an input image and
returns the points it found. For a description of what exactly
the SURF algorithm does you should read the following paper:
SURF: Speeded Up Robust Features
By Herbert Bay, Tinne Tuytelaars, and Luc Van Gool
Also note that there are numerous flavors of the SURF algorithm
you can put together using the functions in dlib. The get_surf_points()
function is just an example of one way you might do so.
This object is a tool for performing image feature extraction. In
particular, it wraps another image feature extractor and converts
the wrapped image feature vectors into sparse indicator vectors. It does
this by hashing each feature vector and then returns a new vector
which is zero everywhere except for the position determined by the
hash.
The following feature extractors can be wrapped by the hashed_feature_image:
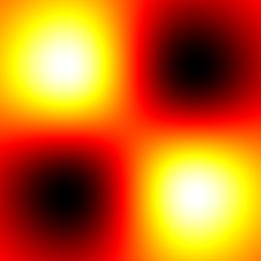
Converts a grayscale image into a heatmap. This is useful if you want
to display a grayscale image with more than 256 values. In particular,
this function uses the following color mapping:
This object represents an image pyramid where each level in the
pyramid holds determinants of Hessian matrices for the original
input image. This object can be used to find stable interest
points in an image.
This object is an implementation of the fast Hessian pyramid
as described in the paper:
SURF: Speeded Up Robust Features
By Herbert Bay, Tinne Tuytelaars, and Luc Van Gool
This implementation was also influenced by the very well documented
OpenSURF library and its corresponding description of how the fast
Hessian algorithm functions:
Notes on the OpenSURF Library by Christopher Evans
This object is a tool for computing the line finding version of
the Hough transform given some kind of edge detection image as
input. It also allows the edge pixels to be weighted such that
higher weighted edge pixels contribute correspondingly more to
the output of the Hough transform, allowing stronger edges to
create correspondingly stronger line detections in the final
Hough transform.
This class is a tool for computing first and second derivatives of an
image. It does this by fitting a quadratic surface around each pixel and
then computing the gradients of that quadratic surface. For the details
see the paper:
This technique gives very accurate gradient estimates and is
also very fast since the entire gradient estimation procedure,
for each type of gradient, is accomplished by cross-correlating
the image with a single separable filter. This means you can
compute gradients at very large scales (e.g. by fitting the
quadratic to a large window, like a 99x99 window) and it still
runs very quickly.
For example, the filters used to compute the X, Y, XX, XY,
and YY gradients at a scale of 130 are shown below:
This function does the opposite of extract_image_chips.
That is, it takes a cropped image and draws it into a larger image in some user defined location.
This is a specialization of the integral_image_generic
template for the case where sums of pixel values should be represented with
longs. E.g. if you use 8bit pixels in your original images then this is
the appropriate kind of integral image to use with them.
This object is an alternate way of representing image data
that allows for very fast computations of sums of pixels in
rectangular regions. To use this object you load it with a
normal image and then you can use the get_sum_of_area()
member function to compute sums of pixels in a given area in
constant time.
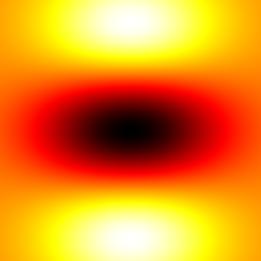
Converts a grayscale image into an image using the jet color
scheme. This is useful if you want to display a grayscale image
with more than 256 values. In particular, this function uses the
following color mapping:
This object loads a JPEG image file into
an array2d of pixels.
Note that you must define DLIB_JPEG_SUPPORT if you want to use this object. You
must also set your build environment to link to the libjpeg library. However,
if you use CMake and dlib's default CMakeLists.txt file then it will get setup
automatically.
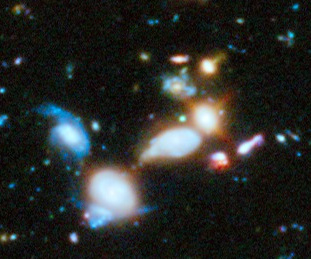
This function performs a watershed segmentation of an image and
labels each resulting flooding region with a unique integer label.
For example, given an image like this, which shows part of the Hubble ultra deep field:
The algorithm would flood fill it and produce the following segmentation. If you play
the video you can see the actual execution of the algorithm where it starts by flooding
from the brightest areas and progressively fills each region.
Scales an image so that it fits into another size, while preserving the aspect
ratio of the actual contents by appropriate 0 padding.
C++ Example Programs: dnn_yolo_train_ex.cpp
This global function takes a file name and
loads it into an array2d of
pixels using the appropriate image
loading routine. The supported types are BMP, PNG, JPEG, GIF, and the dlib DNG file format.
Note that you can only load PNG, JPEG, and GIF files if you link against
libpng, libjpeg, and libgif respectively. You will also need to #define
DLIB_PNG_SUPPORT, DLIB_JPEG_SUPPORT, and DLIB_GIF_SUPPORT. Or use CMake and
it will do all this for you.
This function loads a JPEG image file into
an array2d of pixels.
Note that you must define DLIB_JPEG_SUPPORT if you want to use this function. You
must also set your build environment to link to the libjpeg library. However,
if you use CMake and dlib's default CMakeLists.txt file then it will get setup
automatically.
This function loads a Portable Network Graphics (PNG) image file into
an array2d of pixels.
Note that you must define DLIB_PNG_SUPPORT if you want to use this function. You
must also set your build environment to link to the libpng library. However,
if you use CMake and dlib's default CMakeLists.txt file then it will get setup
automatically.
This function loads a WebP image file into
an array2d of pixels.
Note that you must define DLIB_WEBP_SUPPORT if you want to use this function. You
must also set your build environment to link to the libwebp library. However,
if you use CMake and dlib's default CMakeLists.txt file then it will get setup
automatically.
This function extracts the uniform local-binary-pattern feature at every pixel
of an image and stores the output in a new image object.
We use the idea of uniform LBPs from the paper:
Face Description with Local Binary Patterns: Application to Face Recognition
by Ahonen, Hadid, and Pietikainen.
This function slides a rectangle over an input image and outputs a new
image which contains the maximum valued pixel found inside the rectangle at each
position in the input image.
This function implements the salient object detection method described in the paper:
"Minimum barrier salient object detection at 80 fps" by Zhang, Jianming, et al.
This routine takes an image as input and creates a new image where objects that are
visually distinct from the borders of the image have bright pixels while everything else is
dark. This is useful because you can then threshold the resulting image to detect objects.
For example, given the left image as input you get the right image as output:
This object is a tool for performing image feature extraction. In
particular, it wraps another image feature extractor and converts
the wrapped image feature vectors into sparse indicator vectors. It does
this by finding the nearest neighbor for each feature vector and returning an
indicator vector that is zero everywhere except for the position indicated by
the nearest neighbor.
The following feature extractors can be wrapped by the nearest_neighbor_feature_image:
This object is a tool for detecting the positions of objects in an image. In
particular, it is a simple container to aggregate an instance of an image
scanner object (either scan_fhog_pyramid,
scan_image_pyramid, scan_image_boxes, or
scan_image_custom), the weight vector
needed by one of these image scanners, and finally an instance of
test_box_overlap. The test_box_overlap object
is used to perform non-max suppression on the output of the image scanner
object.
Note that you can use the
structural_object_detection_trainer
to learn the parameters of an object_detector. See the example programs for an introduction.
Also note that dlib contains more powerful CNN based object detection
tooling, which will usually run slower but produce much
more general and accurate detectors.
This function finds a threshold value that would be reasonable to use with
threshold_image. It does this by finding the threshold that
partitions the pixels in an image into two groups such that the sum of absolute
deviations between each pixel and the mean of its group is minimized.
This object loads a Portable Network Graphics (PNG) image file into
an array2d of pixels.
Note that you must define DLIB_PNG_SUPPORT if you want to use this object. You
must also set your build environment to link to the libpng library. However,
if you use CMake and dlib's default CMakeLists.txt file then it will get setup
automatically.
This object is a tool for extracting local feature descriptors from an image.
In particular, it fits polynomials to local pixel patches and
allows you to query the coefficients of these polynomials.
This object downsamples an image at a ratio of infinity to 1. That
means it always outputs an image of size zero. This is useful because
it can be supplied to routines which take a pyramid_down function object
and it will essentially disable pyramid processing. This way, a pyramid
oriented function can be turned into a regular routine which processes
just the original undownsampled image.
This is a simple function object to help create image pyramids. It
downsamples an image by a ratio of N to N-1 where N is supplied by the
user as a template argument.
This routine upsamples an image. In particular, it takes a
pyramid_down object (or an object with a
compatible interface) as an argument and performs an upsampling
which is the inverse of the supplied pyramid_down object.
This object generates a random color balancing and gamma correction
transform. It then allows you to apply that specific transform to as many
rgb_pixel objects as you like.
This object is a tool for extracting random crops of objects from a set of
images. The crops are randomly jittered in scale, translation, and
rotation but more or less centered on objects specified by mmod_rect
objects.
This routine takes a list of edge pixels and discards the ones that
have outlying gradient directions. In particular, it finds the
largest group of pixels in an edge that are all within a user
specified angle of each other. Therefore, if you are looking for
straight lines then this routine is a useful tool since it allows
you to discard noisy edge pixels with inconsistent angles.
Recall that the scan_image_pyramid and
scan_image_boxes objects can't produce
all possible rectangles as object detections since they only
consider a limited subset of all possible object positions.
Therefore, when training an object detector that uses these tools
you must make sure the training data does not contain any object
locations that are unobtainable by the image scanning model.
The remove_unobtainable_rectangles() routine is a tool to filter out
these unobtainable rectangles from the training.
This function takes a set of full_object_detections
which represent human faces annotated with 68 facial landmarks (according to the iBUG 300-W
scheme) and converts them into a form suitable for display on an
image_window.
For example, it will take the output of a shape_predictor
that uses this facial landmarking scheme and will produce visualizations like this:
This routine takes a set of images and bounding boxes within those
images and rotates the entire dataset by a user specified angle.
This means that all images are rotated and the bounding boxes are adjusted
so that they still sit on top of the same visual objects in the new rotated images.
This global function saves an image as a MS Windows BMP file.
This routine can save images containing any type of pixel. However, it will
convert all color pixels into rgb_pixel and grayscale pixels into
uint8 type before saving to disk.
This global function saves an image as a dlib DNG file (a lossless
compressed image format).
This routine can save images containing any type of pixel. However, the DNG format
can natively store only the following pixel types: rgb_pixel, hsi_pixel,
rgb_alpha_pixel, uint8, uint16, float, and double.
All other pixel types will be converted
into one of these types as appropriate before being saved to disk.
This global function writes an image to disk as a JPEG file.
Note that you must define DLIB_JPEG_SUPPORT if you want to use this function. You
must also set your build environment to link to the libjpeg library. However,
if you use CMake and dlib's default CMakeLists.txt file then it will get setup
automatically.
This routine can save images containing any type of pixel. However, save_jpeg() can
only natively store the following pixel types: rgb_pixel
and uint8. All other pixel types will be converted into
one of these types as appropriate before being saved to disk.
This global function writes an image to disk as a PNG (Portable Network Graphics) file.
Note that you must define DLIB_PNG_SUPPORT if you want to use this function. You
must also set your build environment to link to the libpng library. However,
if you use CMake and dlib's default CMakeLists.txt file then it will get setup
automatically.
This routine can save images containing any type of pixel. However, save_png() can
only natively store the following pixel types: rgb_pixel,
rgb_alpha_pixel, uint8, and uint16. All other pixel
types will be converted into one of these types as appropriate before being
saved to disk.
This global function writes an image to disk as a WebP file.
Note that you must define DLIB_WEBP_SUPPORT if you want to use this function. You
must also set your build environment to link to the libwebp library. However,
if you use CMake and dlib's default CMakeLists.txt file then it will get setup
automatically.
This routine can save images containing any type of pixel. However, save_webp() can
only natively store the following pixel types: rgb_pixel,
rgb_alpha_pixel, bgr_pixel, and bgr_alpha_pixel.
All other pixel types will be converted into one of these types as appropriate
before being saved to disk.
This object is a tool for running a fixed sized sliding window classifier
over an image pyramid. In particular, it slides a linear classifier over
a HOG pyramid as discussed in the paper:
Histograms of Oriented Gradients for Human Detection by Navneet Dalal
and Bill Triggs, CVPR 2005
However, we augment the method slightly to use the version of HOG features
from:
Object Detection with Discriminatively Trained Part Based Models by
P. Felzenszwalb, R. Girshick, D. McAllester, D. Ramanan
IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 32, No. 9, Sep. 2010
Since these HOG features have been shown to give superior performance.
This global function is a tool for sliding a set of rectangles
over an image space and finding the locations where the sum of pixels in
the rectangles exceeds a threshold. It is useful for implementing
certain kinds of sliding window classifiers.
This object is a tool for running a classifier over an image with the goal
of localizing each object present. The localization is in the form of the
bounding box around each object of interest.
Unlike the scan_image_pyramid object which scans a
fixed sized window over an image pyramid, the scan_image_boxes tool allows you to
define your own list of "candidate object locations" which should be evaluated.
This is simply a list of rectangle objects which might contain objects of
interest. The scan_image_boxes object will then evaluate the classifier at each
of these locations and return the subset of rectangles which appear to have
objects in them.
This object can also be understood as a general tool for implementing the spatial
pyramid models described in the paper:
Beyond Bags of Features: Spatial Pyramid Matching for Recognizing
Natural Scene Categories by Svetlana Lazebnik, Cordelia Schmid,
and Jean Ponce
The following feature extractors can be used with the scan_image_boxes object:
This object is a tool for running a classifier over an image with the goal
of localizing each object present. The localization is in the form of the
bounding box around each object of interest.
Unlike the scan_image_pyramid
and scan_image_boxes objects, this image
scanner delegates all the work of constructing the object feature vector to
a user supplied feature extraction object. That is, scan_image_custom
simply asks the supplied feature extractor what boxes in the image we
should investigate and then asks the feature extractor for the complete
feature vector for each box. That is, scan_image_custom does not apply any
kind of pyramiding or other higher level processing to the features coming
out of the feature extractor. That means that when you use
scan_image_custom it is completely up to you to define the feature vector
used with each image box.
This global function is a tool for sliding a set of rectangles
over an image space and finding the locations where the sum of pixels in
the rectangles exceeds a threshold. It is useful for implementing
certain kinds of sliding window classifiers. The behavior of this
routine is similar to scan_image except that
it can also handle movable parts in addition to rigidly placed parts
within the sliding window.
This object is a tool for running a sliding window classifier over
an image pyramid. This object can also be understood as a general
tool for implementing the spatial pyramid models described in the paper:
Beyond Bags of Features: Spatial Pyramid Matching for Recognizing
Natural Scene Categories by Svetlana Lazebnik, Cordelia Schmid,
and Jean Ponce
It also includes the ability to represent movable part models.
The following feature extractors can be used with the scan_image_pyramid object:
Attempts to segment an image into regions which have some visual consistency to them.
In particular, this function implements the algorithm described in the paper:
Efficient Graph-Based Image Segmentation by Felzenszwalb and Huttenlocher.
This routine uses determine_object_boxes to obtain a set of
object boxes and then adds them to a scan_image_pyramid object
as detection templates. It also uses create_grid_detection_template
to create each feature extraction region. Therefore, the detection templates will extract
features from a regular grid inside each object box.
This function is identical to setup_grid_detection_templates
except that it also outputs information regarding the selected detection templates
to standard out.
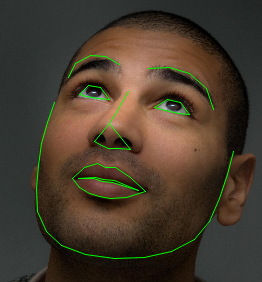
This object is a tool that takes in an image region containing some object
and outputs a set of point locations that define the pose of the
object. The classic example of this is human face pose prediction, where
you take an image of a human face as input and are expected to identify the
locations of important facial landmarks such as the corners of the mouth
and eyes, tip of the nose, and so forth. For example, here is the output
of dlib's 68-face-landmark shape_predictor on an image from the HELEN dataset:
To create useful instantiations of this object you need to use the
shape_predictor_trainer object to train a
shape_predictor using a set of training images, each annotated with shapes you want to predict.
To do this, the shape_predictor_trainer uses the state-of-the-art method from the
paper:
One Millisecond Face Alignment with an Ensemble of Regression Trees
by Vahid Kazemi and Josephine Sullivan, CVPR 2014
This function computes the skeletonization of an image. That is,
given a binary image, we progressively thin the binary blobs
until only a single pixel wide skeleton of the original blobs
remains.
This function returns a lightweight sub-image of another image. In particular,
the returned sub-image simply holds a pointer to the original image, meaning there
is no overhead for using or creating the sub-image.
This function slides a rectangle over an input image and outputs a new
image which contains the sum of pixels inside the rectangle at each
position in the input image.
This function takes an array of images and tiles them into a single large
square image and returns this new big tiled image. Therefore, it is a useful
method to visualize many small images at once.
This routine converts a dlib style image into an instance of OpenCV's cv::Mat object.
This is done by setting up the Mat object to point to the same memory as the dlib image.
Note that you can do the reverse conversion, from OpenCV to dlib,
using the cv_image object.
This routine is a tool for transforming images using some kind of point mapping
function (e.g. point_transform_affine)
and pixel interpolation tool (e.g. interpolate_quadratic).
An example application of this routine is for image rotation. Indeed, it is how
rotate_image is implemented.
This routine takes a set of images and bounding boxes within those images and
upsamples the entire dataset. This means that all images are upsampled and the
bounding boxes are adjusted so that they still sit on top of the same visual
objects in the new images.
This object loads a WebP image file into
an array2d of pixels.
Note that you must define DLIB_WEBP_SUPPORT if you want to use this object. You
must also set your build environment to link to the libwebp library. However,
if you use CMake and dlib's default CMakeLists.txt file then it will get setup
automatically.
 Examples: C++
Examples: C++